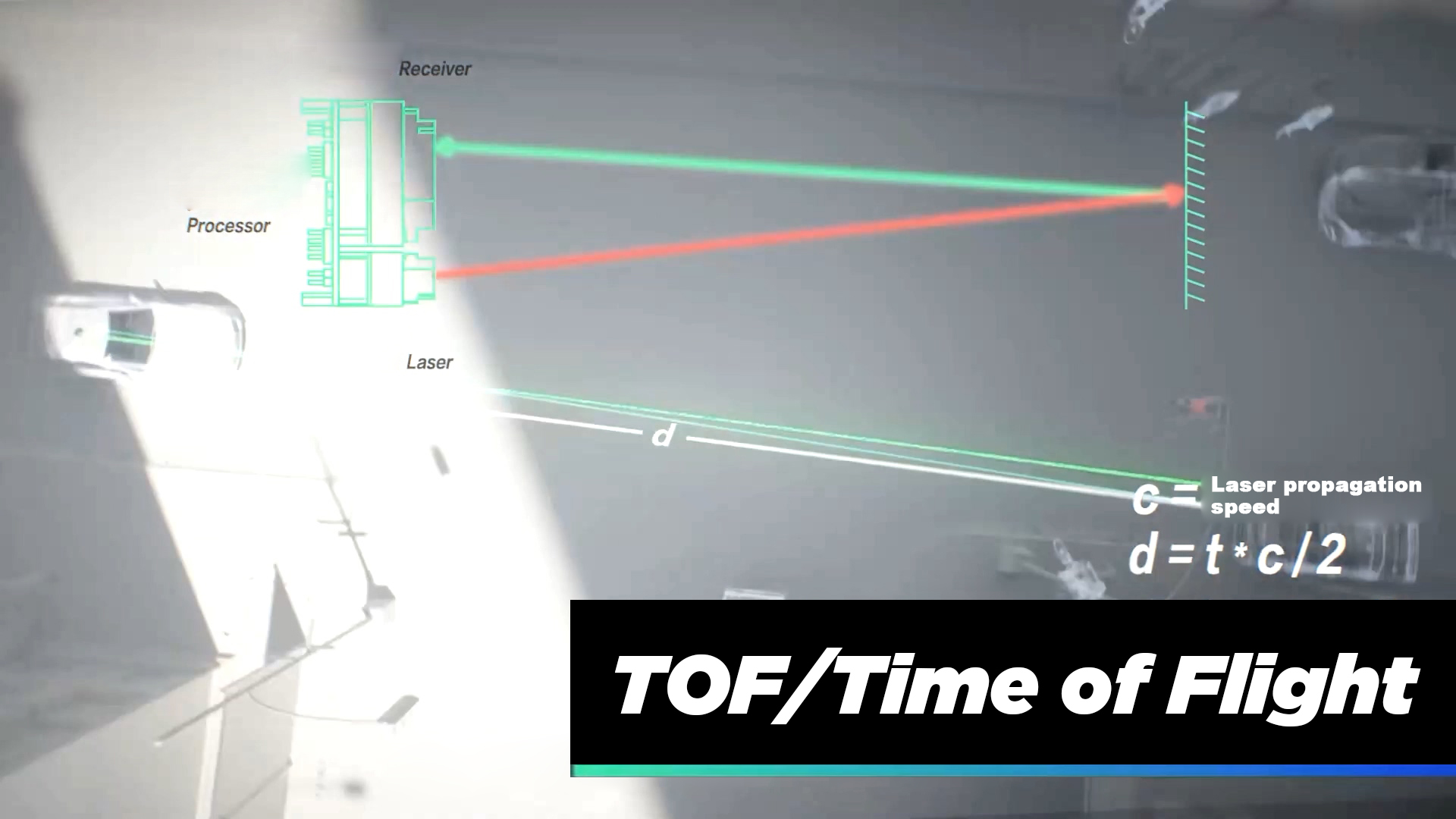
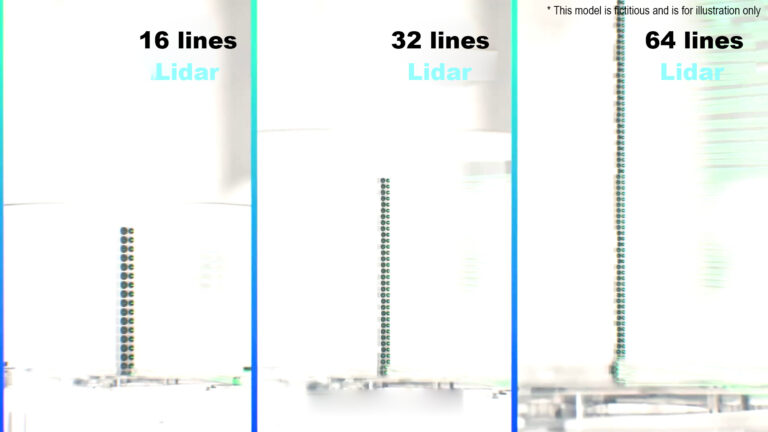
 LiDAR consists of a laser, a receiver and a processor, which can accurately illuminate the surface of any object in space, and one of the echoes must be reflected to the starting point and received by the receiver. The processor calculates the round-trip time of this light beam, and the precise distance of this point can be obtained. This ranging method is called “Time of Flight”, or TOF for short. The three-dimensional positioning of this point can be obtained by assigning angle information to this beam of light in the space coordinate system. When we have an infinite number of rays, we can use an infinite number of such points to outline the details of all objects in space, which is the “point cloud”- the three-dimensional vision of LiDAR. The performance of LiDAR is mainly reflected in its ranging capability, resolution and accuracy, which is a competition of the comprehensive strength of optical and electronic systems, and its reliability depends on the scanning module, which is a competition of mechanical design reliability.
LiDAR consists of a laser, a receiver and a processor, which can accurately illuminate the surface of any object in space, and one of the echoes must be reflected to the starting point and received by the receiver. The processor calculates the round-trip time of this light beam, and the precise distance of this point can be obtained. This ranging method is called “Time of Flight”, or TOF for short. The three-dimensional positioning of this point can be obtained by assigning angle information to this beam of light in the space coordinate system. When we have an infinite number of rays, we can use an infinite number of such points to outline the details of all objects in space, which is the “point cloud”- the three-dimensional vision of LiDAR. The performance of LiDAR is mainly reflected in its ranging capability, resolution and accuracy, which is a competition of the comprehensive strength of optical and electronic systems, and its reliability depends on the scanning module, which is a competition of mechanical design reliability.

Autopilot

logistics

V2X

robot

industry
LiDAR consists of a laser, a receiver and a processor, which can accurately illuminate the surface of any object in space, and one of the echoes must be reflected to the starting point and received by the receiver. The processor calculates the round-trip time of this light beam, and the precise distance of this point can be obtained. This ranging method is called “Time of Flight”, or TOF for short. The three-dimensional positioning of this point can be obtained by assigning angle information to this beam of light in the space coordinate system. When we have an infinite number of rays, we can use an infinite number of such points to outline the details of all objects in space, which is the “point cloud”- the three-dimensional vision of LiDAR. The performance of LiDAR is mainly reflected in its ranging capability, resolution and accuracy, which is a competition of the comprehensive strength of optical and electronic systems, and its reliability depends on the scanning module, which is a competition of mechanical design reliability.
Autopilot
logistics
V2X
robot